Беспилотные технологии
В мартовском номере журнала «Автоматика, связь, информатика» вышла статья «Проекты систем технического зрения для автоматического управления движением поездов», автором которой является заместитель начальника Департамента информационных технологий – начальник отдела стратегического развития АО «НИИАС» Охотников А.Л.
Беспилотные технологии все шире применяются в различных областях. В отчете аналитиков Visiongain указано, что мировой рынок технологий по автоматизации подвижного состава в последние годы динамично развивается. Сегодня объем рынка составляет более $7 млрд и к 2031 г. превысит $21 млрд.
Система автоматического управления движением поездов (САУ ДП) является перспективной и повышающей безопасность пассажирских и грузовых перевозок. Железнодорожные компании рассматривают САУ ДП как новую операционную парадигму, которая даст возможность повысить гибкость и безопасность движения с одновременным снижением операционных затрат. При этом рассматриваются три ключевых сегмента использования системы автоматического управления движением поездов: магистральный, маневровый и городской [1].
Для разработки и внедрения высокотехнологичных решений в области искусственного интеллекта и систем автоматического управления во многих странах создаются проекты, способные довести перспективные разработки с элементами искусственного интеллекта и сенсорики до промышленного образца. К ним относятся такие проекты, как Sensors4Rail, SMART2, RODS от Rail Vision, VAL 2020 и многие другие, в том числе стартующий в 2024 г. Europe’s Rail (EU-Rail), созданный в рамках программы Horizon Europe (2020-2027) и являющийся универсальным преемником совместного предприятия Shift2Rail.
В России системы технического зрения применяются с 2017 г. на тяговом подвижном составе на станции Лужская. К существующим проектам российских разработчиков относятся Ctrl@Vision 100 (ООО «ЛокоТех-Сигнал»), БОП (ОАО «РЖД», АО «НИИАС») и БСТЗ (АО «НИИАС»), Cognitive Rail Pilot (ООО «Когнитив Роботикс»). Разработку СТЗ осуществляют и другие предприятия, в том числе «АВП-Технология».
Sensors4Rail – проект запущен в конце 2020 г. для оснащения подвижного состава городской железной дороги Гамбурга (Германия) интеллектуальными датчиками технического зрения для контроля обстановки перед поездом и определения препятствий. В нем участвуют такие компании, как Siemens Mobility, Bosch Engineering, Here Technologies и Ibeo Automotive Systems и др.
Компания Siemens отвечает за комплексное тестирование и средства определения местоположения головы поезда с применением современных средств одометрии, включающих спутниковую навигацию. Bosch предоставляет радары и инфракрасные камеры среднего и дальнего радиуса действия, а также стереокамеры, которые позволяют надежно распознавать окружающую обстановку ночью и в тумане. Ibeo разрабатывает твердотельные лидары. Here Technologies обеспечивает сопровождение трехмерных электронных карт пути с указанием опорных объектов, посредством которых можно определить положение поезда с сантиметровой точностью. Объекты цифровой модели пути используются также для определения высокоточных координат головы поезда на платформах с применением технологий Bosch и Ibeo. Телекоммуникационная компания Vodafone организует высокоскоростную сеть связи стандарта 4G.
Указанные технологии позволят повысить уровень автоматизации управления поездами вплоть до GoA4 и создать интеллектуальную транспортную систему ИТС. Система управления, лежащая в основе ИТС, даст возможность контролировать работу множества киберфизических систем КФС, которые выполняют различные функции в железнодорожных перевозках [2].
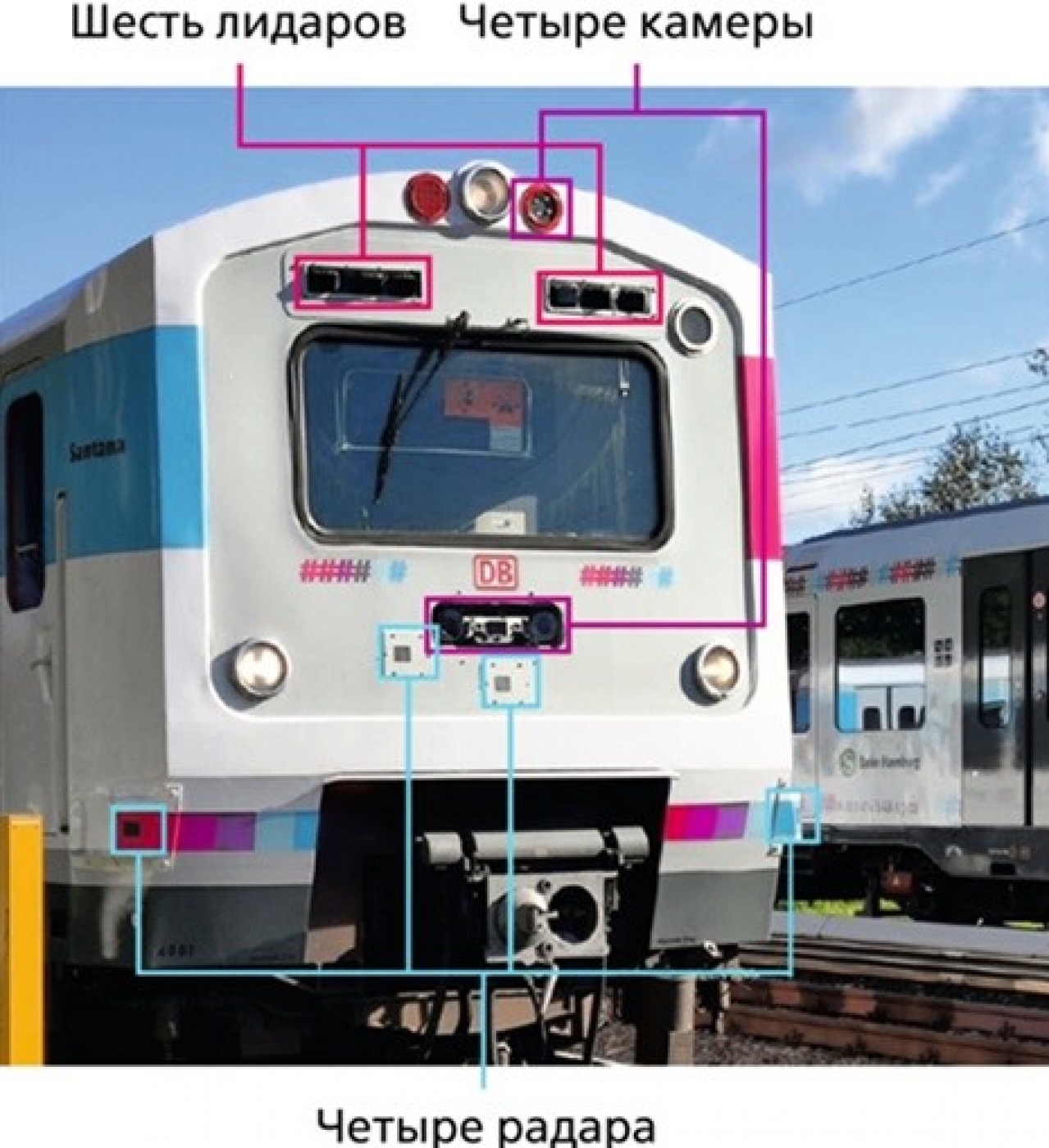
Позиционирование поезда осуществляется путем обработки сигналов системы спутниковой навигации, а радиоканал обмена данными со скоростью 10 Гбит/с организуется с использованием сети стандарта 4G. Одна из главных задач проекта заключается в интегрировании в состав бортового оборудования видеокамер, радаров и лидаров, а также высокопроизводительных серверов с несколькими графическими процессорами и хранилища данных.
Шесть лидаров, размещенных над лобовым стеклом кабины машиниста, сканируют пространство перед поездом, выполняя 30 720 измерений с частотой 15 Гц и формируя трехмерное облако точек в реальном времени. Инфракрасная камера, установленная рядом с лобовым прожектором, служит для обнаружения объектов в диапазоне волн от 8 до 14 мкм. Как и лидары, работающие в диапазоне, близком к инфракрасному, эта камера способна различать неподвижные и движущиеся объекты независимо от их освещенности, в том числе в полной темноте, например в тоннелях.
Под лобовым стеклом установлены еще три камеры видимого диапазона: одна из них выдает изображение объектов ближней зоны с указанием глубины, две другие контролируют среднюю (300 м с углом обзора 30°) и дальнюю (550 м с углом обзора 10°) зоны. При распознавании объектов учитываются не только условия окружающей среды, но и размеры объекта, его контрастность и отражающая способность. В комплект датчиков головной части поезда входят также четыре радара, работающие на частоте от 76 до 77 ГГц.
Бортовая подсистема определения местоположения поезда включает в себя импульсный колесный и инерциальный датчики, а также оптический датчик головки рельса и вычислительное устройство. В этом устройстве происходит консолидация данных от датчиков, в том числе используемых в подсистеме распознавания окружающей обстановки и получаемых методом локализации и построения карты (SLAM) при помощи радаров, а также путем обнаружения объектов, которые выступают в роли реперных точек. Определенное таким образом местоположение поезда сравнивается с данными эталонной высокоточной системы позиционирования. Выявленные отклонения анализируются и нивелируются. Схема реализации системы Sensors4Rail показана на рис. 1, размещение оборудования на локомотиве – на рис. 2 [3].
.jpg)
Рис. 1
.jpg)
Рис. 2
SMART2 – проект, запущенный в 2019 г., является продолжением европейской инициативы SMART от Shift2Rail. Он включает разработку системы обнаружения препятствий для грузовых поездов на железнодорожных магистралях со смешанным движением на скорости до 100 км/ч [4]. К задачам проекта относятся: распознавание рельсового пути, обнаружение возможных препятствия на расстоянии до 1 000 м и вагонов на расстоянии до 200 м для маневровых операций с точностью до ± 5 см. Причем полевые испытания показали, что система соответствует всем определенным для нее функциональным требованиям.
Цель проекта состояла в разработке системы всепогодного обнаружения препятствий дальнего действия и обнаружения проникновения на пути. Она объединяет в себе бортовую, инфраструктурную и основанную на дронах подсистемы, а также центральную систему поддержки принятия решений, реализованную в облачной среде. Такая интегрированная система дает возможность расширить зону обнаружения, включая области за поворотом, уклоном, тоннелем и другими элементами, блокирующими обзор. Реализация проекта рассчитана на четыре года. Принцип работы системы обнаружения препятствий SMART2 продемонстрирован на рис. 3.
.jpg)
Рис. 3
RODS от Rail Vision представляет собой одну из разработок израильской компании Rail Vision в части определения препятствий на железной дороге. Система RODS (Rail Obstacle Detection System) может определять препятствия в условиях прямой видимости на расстоянии до 2000 м при движении поезда со скоростью 200 км/ч [5].
Решение RODS помогает машинисту или оператору (в случае дистанционного управления) осуществлять полный визуальный контроль с помощью комплекта оборудования, установленного на крыше поезда. В такой комплект входит длиннофокусная камера видимого обзора и две инфракрасные камеры для дальней (1-2 км) и средней (до 800 м) дистанций. Информация от всех камер объединяется и обрабатывается. После идентифицирования объекта на путях машинисту выдается аварийное оповещение для принятия мер по предотвращению аварийной ситуации. Система технического зрения RODS от Rail Vision показана на рис. 4.
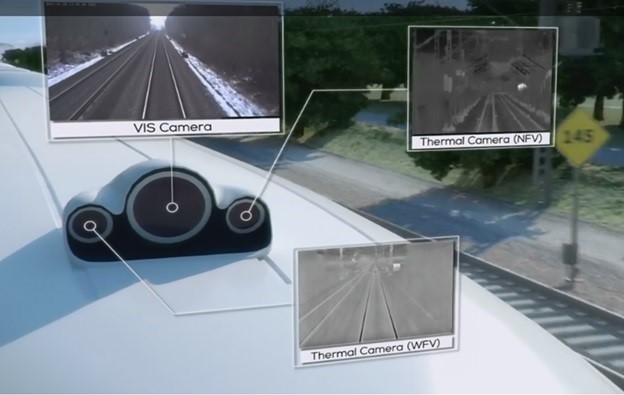
Рис. 4
Cognitive Rail Pilot является российской разработкой компании Cognitive Technologies. Тестирование и испытание аппаратной части этой системы проводились по многим параметрам: электромагнитной совместимости, помехо-, вибро- и влагоустойчивости, соответствию климатическим нормами др. В ходе испытаний маневровые тепловозы, оборудованные системой технического зрения, эксплуатировались более 300 ч в режиме опытного пробега с участием разработчиков и более 5 тыс. ч – в условиях подконтрольной эксплуатации без их присутствия.
Камеры, интегрированные в систему, в настоящее время позволяют распознавать объекты на расстоянии до 300 м, однако планируется увеличить этот показатель не менее, чем в 2 раза. Система готова к тиражированию для маневровых локомотивов [6]. На рис. 5 приведены элементы системы Cognitive Rail Pilot [7]: блок видеокамер с электронной системой контроля и поддержания климата и трехосевой системой гашения вибраций (1), специализированный радар миллиметрового диапазона высокого разрешения (2), высокопроизводительный вычислительный блок в индустриальном исполнении (3).

Рис. 5
БСТЗ – бортовая система технического зрения, разработанная АО «НИИАС», прошла сертификацию. Проведено декларирование компонентов аппаратной и программной части оборудования БСТЗ на соответствие требованиям технического регламента Таможенного союза ТР ТС 001/2011 и EAЭС N RU Д-RU.PA05.B.51577/22. Система установлена на маневровом локомотиве ЧМЭ3.
БСТЗ представляет собой распределенную систему, содержащую две видеокамеры ближнего (до 50 м) и две дальнего (50-200 м) действия, вычислительный модуль, модуль управления, монитор для взаимодействия с машинистом и устройство управления тормозной системой [8]. Она определяет наличие препятствия на пути маневрового локомотива и расстояние до него (до 100 м), исправность колеи по пути следования (до 200 м), стрелок (до 100 м) и их положение (до 50 м), светофоров и их показаний (до 200 м).
В качестве основной технологии обработки видеоинформации в вычислительном модуле используются новейшие архитектуры нейронных сетей для решения задач сегментации, локализации и классификации объектов. Элементы системы технического зрения для маневровых локомотивов БСТЗ изображены на рис. 6.
.jpg)
Рис. 6
БОП – блок обнаружения препятствий. Это – интегрированный бортовой комплекс, использующий широкий спектр цифровых датчиков и реализующий передовые решения по обработке данных, в которых применяется искусственный интеллект (искусственные нейронные сети и глубокое обучение). БОП имеет модульную архитектуру и уникальное программное обеспечение. Предполагается, что в конечном исполнении в него войдут 4 радара, 4 лидара, 2 тепловизора и 8 видеокамер. Предусмотрено, что система технического зрения БОП будет работать при любых климатических условиях и в ночное время.
БОП, созданный ОАО «РЖД» совместно с АО «НИИАС», прошел сертификацию специальной модификации электропоезда «Ласточка» с уровнем автоматизации GoA3+. Сертификаты соответствия требованиям Технического регламента Таможенного союза «О безопасности железнодорожного подвижного состава» (ТР ТС 001/2011) получены в конце 2021 г. В процессе ходовых испытаний подтверждена возможность распознавания препятствий на расстоянии не менее 600 м. Система технического зрения БОП представлена на рис.7.
.jpg)
Рис. 7
Система БОП наиболее близка по параметрам к Sensors4Rail. Сравнительные данные о функциях и оборудовании этих систем приведены в таблице.
|
Функции и оборудование |
Sensors4Rail |
БОП |
|
Подвижной состав |
Электропоезд серии 472 |
Электропоезд ЭС2Г |
|
Эксплуатация ПС |
DB Systemtechnik |
ДОСС |
|
Участок опытной эксплуатации |
23 км |
53 км |
|
Система распознавания |
Bosch Engineering |
Neousys Technology Inc. |
|
Система технического зрения |
Ibeo Automotive Systems |
Livox, Axion, Фотоника |
|
Электронная карта |
HERE Technologies |
НИИАС - ЦМП |
|
Создание 3D карты |
Leica Pegasus 2 (3-5 cм) |
Riegl VMX-450, Trimble, БПЛА (до 5 см) |
|
Телекоммуникация 4G |
Vodafone |
Билайн |
|
Лидары |
6 шт. (30 тыс. изм/с, 15 Гц) |
4 шт. (905 nm, 20 Гц) 200 и 500 м |
|
Тепловизоры (ИК-камеры) |
1 шт. (8-14 мкм) |
2 шт. |
|
Видеокамеры |
3 шт. (стерео на 300 м, 1 -до 550 м) |
8 шт. (100-300-600 м) |
|
Радары |
4 шт. (76-77 ГГц) |
4 шт. (до 3 м) |
Ctrl@Vision 100 – система позволяет определять препятствия и автоматически предотвращать столкновения посредством подачи управляющего сигнала на торможение. Она создана ООО «ЛокоТех-Сигнал» и установлена на маневровом тепловозе ТГМ6А на Череповецком металлургическом комбинате [9].
В Ctrl@Vision 100 применены 4 камеры (рис. 8): одна – для ближней зоны (20 м), другая – для детектирования объектов от 100 м, еще две – используются в качестве стереопары для определения расстояния до объектов (вместо дорогих лидаров). Радар применяется для обнаружения и регистрации скорости объекта на путях. Дальность действия системы технического зрения Ctrl@Vision 100 составляет 100-150 м с возможностью работы в любую погоду, время реакции на препятствие – до 0,5 с.
.jpg)
Рис. 8
Таким образом, приведенные в статье проекты по разработке СТЗ для систем автоматического управления беспилотным железнодорожным транспортом указывают на активную работу отечественных и зарубежных компаний по созданию современных средств для точного определения и идентификации препятствий с целью предотвращения аварийных ситуаций.
После длительного перерыва, вызванного пандемией, в 2022 г. в Берлине состоялась крупнейшая международная железнодорожная выставка InnoTrans, где были представлены тренды в области систем автоматического управления, перспективные технические решения для систем технического зрения [10]. Следует отметить, что сравнительный анализ отечественных и зарубежных проектов показал высокую научно-технологическую готовность подразделений холдинга «РЖД» к созданию элементов системы автоматического управления и внедрению новейших разработок в области беспилотных технологий. Эти разработки позволят в дальнейшем владельцам железнодорожной инфраструктуры повысить энергоэффективность и увеличить пропускную способность железнодорожных линий за счет использования беспилотного подвижного состава.
Список источников
- Охотников, А. Л. Алгоритм выбора оборудования для систем технического зрения на железнодорожном транспорте / А. Л. Охотников // Наука и технологии железных дорог. – 2021. – Т. 5. – № 1(17). – С. 65-74. – EDN TWRACV.
- Охотников, А. Л. Алгоритмы транспортных киберфизических систем / А. Л. Охотников, В. Я. Цветков, А. В. Козлов // Железнодорожный транспорт. – 2021. – № 12. – С. 49-53. – EDN KJWWMQ.
- SMART2 project. Retrieved from / URL:/https://smart2rail-project.net/.
- Охотников, А. Л. Управление автоматическими транспортными объектами в стохастической ситуации / А. Л. Охотников, В. Я. Цветков // Автоматика, связь, информатика. – 2021. – № 2. – С. 37-41. – DOI 10.34649/АТ.2021.2.2.002. – EDN MKVKTK.
- Cognitive Pilot готова к серийному выпуску систем технического зрения для подвижного состава URL:/https://rollingstockworld.ru/komponenty/cognitive-pilot-gotova-k-serijnomu-vypusku-sistem-tehnicheskogo-zreniya-dlya-podvizhnogo-sostava/ (Обращение 11.12.2022).
- Хатламаджиян, А. Е. Повышение безопасности движения поездов с помощью бортовой системы технического зрения / А. Е. Хатламаджиян, В. В. Орлов, И. С. Николаев // Эксплуатационная надежность локомотивного парка и повышение эффективности тяги поездов: Материалы VII всероссийской научно-технической конференции с международным участием, Омск, 18 ноября 2022 года. – Омск: Омский государственный университет путей сообщения, 2022. – С. 328-334. – EDN JTLVDQ.
- Мащенко, П. Е. Анализ сенсоров систем технического зрения для нужд промышленного железнодорожного транспорта / П. Е. Мащенко, К. В. Шутилов // Вестник Института проблем естественных монополий: Техника железных дорог. – 2021. – № 1(53). – С. 40-45. – EDN FEUABX.
- Долгий, А.И. Автономное движение – отечественный и зарубежный опыт / А.И. Долгий, Е.Н. Розенберг, А.В. Озеров, П.А. Попов, М.А. Чернин // Автоматика, связь, информатика. –2022. –№ 12. –С. 14-16. –DOI: 10.34649/AT.2022.12.12.002.




Комментарии